Intelligent Systems: Bits and Bots
Intelligent systems can autonomously perceive, process information, act flexibly and learn and adapt in changing situations. They are being developed at many scales, from animal or human-sized robots to systems no bigger than a bacterial cell. Their potential uses are many: from targeted drug delivery in the body to performing search-and-rescue missions in disaster zones.
The perception-action-learning loop is at the heart of intelligence. To understand it - let alone replicate it - will be challenging.
Although ‘intelligence’ means different things to different people, it takes a certain generosity to point to bees or bacteria as an example. But why not? Bees can fly hundreds of metres and land on a swaying flower. And bacteria, whilst lacking a brain (or even nerves), might rally their neighbours to migrate to a better place to multiply. These are just two of the ways in which organisms perceive, process information and act autonomously so that they can respond to, and ultimately survive in, their environment. Scientists are looking to examples like these for inspiration as they try to create artificially intelligent helpers of the future.
Intelligent systems could become our assistants and advisors, going beyond human limitations. They could repair nuclear reactors, or detect and treat diseases. Taking these possibilities from the realm of science fiction to the real world will mean exploring the foundations of intelligence - both natural and artificial.
Macrobots
Any intelligent being needs to be versatile enough to cope with a rapidly changing world. For this, it needs an array of sensors that provide it with a barrage of information. The human eye and skin exemplify these sensors, as they can extract vast amounts of information from external signals.


Because of this inherent complexity, like other sensors used by animals, the eye is difficult to imitate, and the brain connected to it even more so. Modern cameras in many ways outperform the human eye - and some even directly sense depth - the main problem is how to convert signals into actions. Computers can look at a painting to identify people, estimate the pose of their limbs, and even estimate their body shape and body mass index (Fig. 1)1. However, this does not mean that computers are anywhere near appreciating the aesthetics of art. Vision is not the same as perception, and how to extract meaning from measurements is still an open research question.
Once an intelligent system has assessed its surroundings, it needs to decide what to do. However, a stimulus-response mechanism for several behaviours would be too restrictive. Instead, behaviour must be dynamic, sorting out the important information from the unimportant. Using algorithms based on statistical inference techniques or the networks of neurons in the animal brain, researchers can already program computers to extract important features from sensory stimuli. As yet, though, macro systems are not very effective at monitoring their behaviour continuously and then determining a course of action, to be revised as their goals and environment change.
Inference, learning and adaptation are essential for dealing with complex environments. Animals evolved to be natural learners over millions of years, and here too, artificial systems still have a long way to go before they are robust and versatile enough to learn with accuracy. The perception-action-learning loop is at the heart of intelligence, and to understand it - let alone replicate it - will be a significant theoretical and experimental challenge.
Small is beautiful
In nature, tiny organisms such as bacteria and insects have limited capacity to learn. Yet the potential of tiny intelligent systems is huge: imagine a group of cell sized nanobots jump-starting defunct nerves with tiny electrical charges precisely where they are needed, or working as collaborators in the laboratory, sitting next to single cells and recording physiological changes.
An advantage of small size is that it sidesteps some physical constraints entirely, whilst also opening new doors. Intelligent systems less than a millimetre in size could be agile, because the pull of gravity on smaller masses becomes increasingly insignificant in comparison to other forces, such as friction and surface tension. They can also reach places larger robots cannot.
Even so, there are some major obstacles, such as building tiny sensors and information processors. Individual cells have very different sensors to whole animals, and they respond to stimuli such as chemicals and electrical impulses in 'reflex' reactions. And insect-sized systems like the flying RoboBee2 can only move thanks to human operators and a remote computer - an on-board processor would require new materials for sub-millimetre parts. Battery life is a major limitation, as existing technologies provide only a few minutes of power. Researchers around the world are trying to reinvent sensors, locomotion and power delivery to bring life to these small systems.
 Billions of nanohelices are grown en mass on a wafer of silicon. (b) Helices can be grown to include a magnetic nickel segment so that they can be accurately guided through fluids using a magnetic field. (c) The trajectories of three artificial nanopropellers3.")
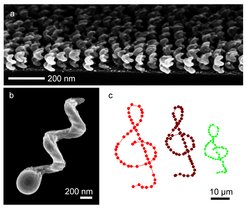
At the micrometre scale the rules and challenges for creating intelligent systems really change, as forces that are alien to our macro world come into play. To a microbe, water is as thick as syrup. Some bacteria have developed a clever swimming technique to overcome this: they tunnel through liquid in a corkscrew motion. Scientists have developed micrometre-long artificial propellers that can do just that (Fig. 2)3; the hope is that one day, these devices might propel tiny intelligent systems through their environment.
Brownian motion, in which small objects are jostled by the molecules around them, can also become important. Swarming is one way in which bacteria keep control of their movement, and scientists expect to design artificial systems that swarm - perhaps to move larger objects4.
Material gains
To have any chance of success, we need to improve our understanding of natural intelligence. Replicating the self-assembly of DNA molecules to build nanoscale structures would be invaluable, but we do not fully understand the rules that govern DNA’s behaviour. And just as nature inspires research in artificial intelligence, so it inspires the search for the building materials that artificial systems will need. We now have humanoid robots that can walk upright and move with both precision and elegance, and a robot bird capable of flight5. But although impressive, the components of these systems are power-intensive and energy inefficient, and mechanically inferior to muscle.
Research from a wide variety of disciplines will have to come together to produce single intelligent entities. Intelligent systems may yet be combined across length scales, to provide macro robots with muscles powered by organic motors, or insect-sized micro robots with self-healing ‘skin’.
In the near future, non-biological materials will be essential - for robots of every size and shape, we need better materials and fabrication methods. Three-dimensional printing or techniques for etching circuits into millimetre-scale devices will likely be invaluable. Engineers and materials scientists must also find a way to power these systems, or enable them to harvest energy from their environment. Yet no matter how synthetic the materials, scientists will continue to take inspiration from the natural world.
Researchers at the Max Planck Institute for Intelligent Systems have developed a way of growing three-dimensional nanostructures, using tiny metal dots as a starting point (Mark, A. G. et al. Nature Materials 12 802-807; 2013). By tilting and rotating the substrate, the researchers produced nanopropellers that mimic flagella, which bacteria use for propulsion. These nanopropellers could be magnetized and guided through fluids with micron-level precision3, and might one day be used to propel microscopic intelligent systems.
References
1Guan, P. et al. IEEE International Conference on Computer Vision 1381–1388 (IEEE, 2009).
2Ma, K. Y. et al. Science 340, 603 (2013).
3Ghosh, A. & Fischer, P. Nano Lett. 9, 2243–2245 (2009).
4Kim, D. et al. Biomed. Microdevices 14, 1009 (2012).
5MacKenzie, D. Science 335, 1430 (2012).